隨著人工智能技術的飛速發展,智能駕駛已成為汽車產業變革的核心驅動力之一。在智能駕駛系統中,軟件,尤其是人工智能基礎軟件,扮演著至關重要的“大腦”角色。它不僅是實現車輛環境感知、決策規劃、控制執行等功能的技術基石,更是決定未來汽車產品差異化競爭與商業模式創新的關鍵。
人工智能基礎軟件在智能駕駛領域的應用,主要集中在感知層的計算機視覺算法、多傳感器融合框架,決策層的路徑規劃與行為預測模型,以及控制層的實時操作系統與中間件等。這些軟件模塊共同構成了一個復雜、高效且安全的軟件棧。例如,在環境感知方面,基于深度學習的視覺識別算法能夠精準識別車道線、交通標志、行人及車輛,為后續決策提供可靠輸入;而多傳感器融合技術則綜合了攝像頭、激光雷達、毫米波雷達等不同傳感器的優勢,提升了系統在復雜天氣和光照條件下的魯棒性。
智能駕駛人工智能基礎軟件的開發也面臨著一系列嚴峻挑戰。首先是對算法安全性與可靠性的極高要求。任何微小的軟件缺陷或決策失誤在高速行駛場景中都可能引發嚴重后果,這使得軟件的測試驗證、功能安全(如ISO 26262標準)和預期功能安全(SOTIF)成為開發過程中的重中之重。是巨大的算力需求與功耗控制之間的矛盾。高級別自動駕駛需要處理海量數據并進行實時計算,這對車載計算平臺的算力和能效提出了苛刻要求,推動著專用AI芯片(如GPU、NPU、ASIC)及其配套軟件棧的快速發展。數據的獲取、標注、處理與合規使用構成了另一大瓶頸。高質量、多樣化的駕駛場景數據是訓練和優化AI模型的基礎,但數據的采集成本高昂,且涉及復雜的隱私與法規問題。
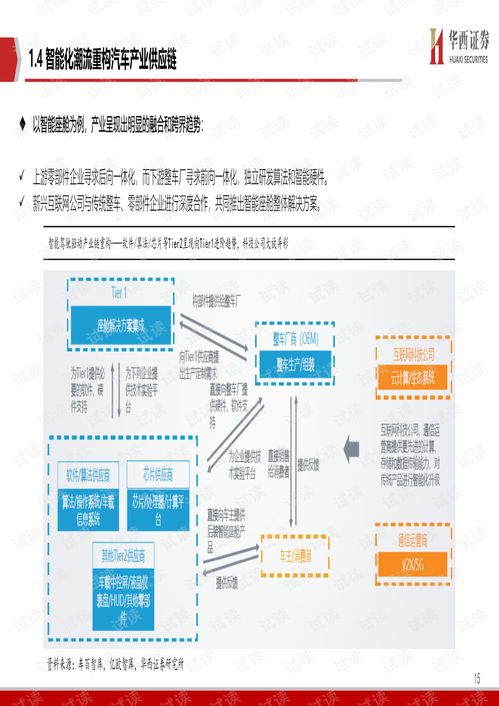
智能駕駛人工智能基礎軟件的開發將呈現以下趨勢:一是軟件架構的標準化與模塊化,以提高開發效率、促進供應鏈協同,如AUTOSAR Adaptive平臺的演進;二是“軟件定義汽車”理念的深化,使得汽車能夠通過OTA(空中下載技術)持續升級和優化其AI能力;三是AI與云計算的深度融合,形成“車-云”協同的智能化體系,在云端進行大規模模型訓練和仿真測試,在車端進行高效推理。
總而言之,人工智能基礎軟件是解鎖智能駕駛潛能的核心鑰匙。其發展不僅需要算法工程師、軟件工程師與汽車工程師的跨界協作,更需要產業界、學術界與政策制定者共同努力,構建起堅實的技術底座、完善的測試驗證體系與健康的產業生態,從而安全、平穩地駛向智能出行的未來。